Des muscles artificiels de nouvelle génération peuvent changer de forme en temps réel et s’auto-réparer
Auteur: Mathieu Gagnon/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2026%2F04%2Fimage-2026-04-26T11-13-21-144Z.jpeg)
Quand les robots restent prisonniers de leur conception initiale
La plupart des robots actuels sont conçus pour accomplir une tâche précise. Une fois fabriqués, leur fonction évolue rarement. Un bras robotique peut saisir, soulever ou trier, mais ses mouvements sont déterminés dès le départ.
Si la mission change, les ingénieurs doivent souvent repenser la machine de fond en comble. Cette opération demande du temps, de l’argent et des efforts considérables.
Un nouveau type de muscle artificiel commence à remettre en question cette logique figée. Il ne se cantonne pas à un seul rôle. Il peut modifier sa forme, se réparer après un dommage et même être réutilisé dans un autre appareil. Ce type de flexibilité pourrait transformer la manière dont les robots sont conçus et utilisés au quotidien.
Une révolution matérielle : l’actionneur élastomère diélectrique

Ce nouveau système repose sur ce qu’on appelle un actionneur élastomère diélectrique, ou DEA. Il s’agit de matériaux souples qui se déplacent lorsque l’électricité les traverse.
Ils alimentent déjà des fonctionnalités comme les vibrations dans les objets connectables et les pinces robotiques souples qui manipulent des articles délicats comme les fruits.
Le changement clé provient d’un matériau spécial ajouté à l’actionneur. Il se comporte comme un solide à température ambiante, mais devient fluide lorsqu’il est exposé à la chaleur ou à des champs magnétiques. Ce basculement permet au matériau de bouger et de se remodeler pendant que l’appareil fonctionne encore.
Briser les chaînes des designs figés
Les muscles artificiels traditionnels dépendent de motifs d’électrodes fixes. Une fois ces motifs imprimés, ils ne peuvent plus changer.
Cela limite ce que le robot peut accomplir. S’il doit manipuler une nouvelle forme ou exécuter un nouveau mouvement, l’ensemble du système doit être repensé.
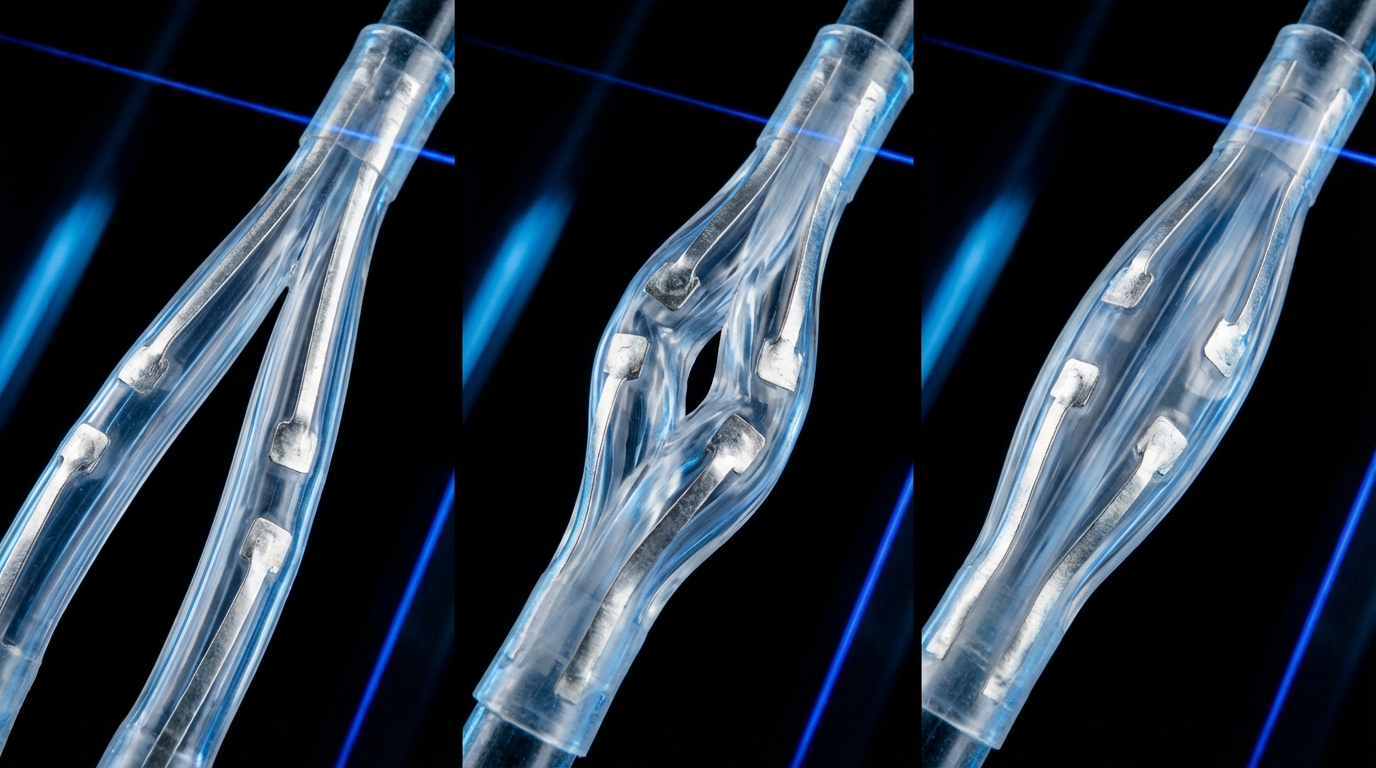
Le nouvel actionneur supprime cette limitation. Son électrode peut se diviser, fusionner et se déplacer en trois dimensions. Elle peut changer de position même pendant l’opération. Cela signifie qu’un seul robot peut effectuer différentes tâches sans être reconstruit.
Cette flexibilité compte dans les environnements réels. Un robot travaillant dans une usine pourrait avoir besoin de basculer entre des mouvements de préhension, de flexion et d’expansion. Au lieu de remplacer des pièces ou des machines, il pourrait s’adapter à la volée.
L’auto-réparation face aux dommages
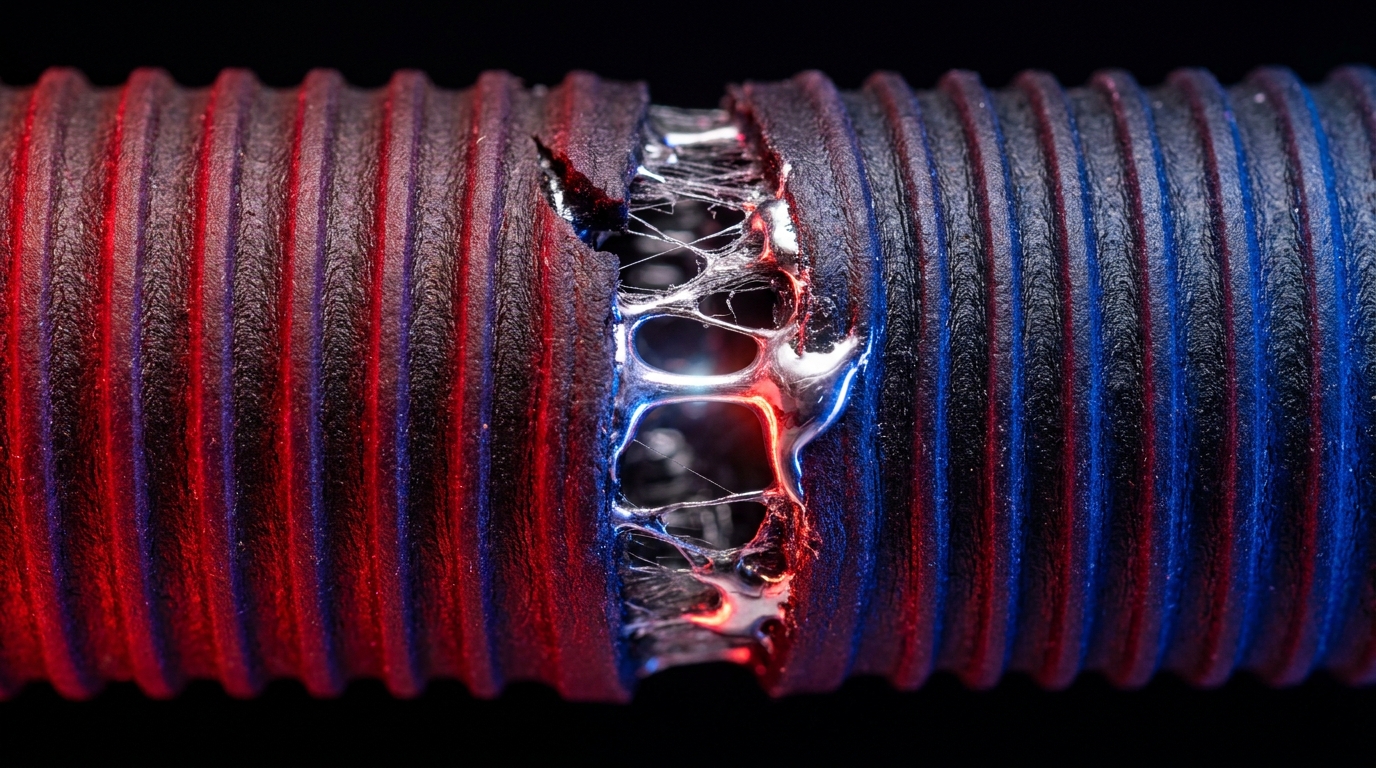
Les dommages représentent un problème majeur en robotique. Un câble coupé ou une défaillance électrique peut arrêter complètement une machine. Ce nouveau système adopte une approche différente.
Si une partie de l’électrode est endommagée, le matériau peut devenir fluide près de cette zone. Il reconnecte les sections brisées ou contourne les dégâts. Le robot continue de fonctionner au lieu de s’arrêter.
Cette capacité prolonge la durée de vie du système. Elle réduit aussi les temps d’arrêt, ce qui s’avère critique dans les environnements industriels où les retards peuvent coûter cher.
Réutiliser les muscles artificiels pour un avenir durable
Une autre caractéristique se démarque. Le matériau d’électrode n’a pas besoin d’être jeté lorsqu’un appareil atteint la fin de sa vie. Il peut être extrait sous forme liquide et utilisé à nouveau dans un nouveau système.
Des tests ont montré que même après plusieurs cycles de réutilisation, le système maintenait un taux de récupération d’environ 91 pour cent tout en continuant à fonctionner de manière cohérente. Cela ouvre la porte à une robotique plus durable, où les pièces sont réutilisées au lieu d’être jetées.
Une percée scientifique vers des éléments programmables vivants
Ce travail mélange science des matériaux et ingénierie mécanique. Le matériau lui-même devait être stable tout en restant flexible. Dans le même temps, le système devait prouver qu’il pouvait bouger, se remodeler et se rétablir dans des conditions réelles.
Le résultat est un actionneur unique qui peut assumer plusieurs rôles selon la situation. C’est un basculement des robots construits pour une seule tâche vers des machines qui s’ajustent selon les besoins.
« Cette étude représente une percée dans la transformation d’électrodes traditionnellement statiques et passives en ‘éléments vivants et programmables’ grâce à des innovations dans la conception des particules et des polymères », a déclaré le coauteur de l’étude Jeong-Yun Sun, professeur à l’Université nationale de Séoul, Faculté d’ingénierie.
« Cette technologie d’électrode auto-réparatrice et reconfigurable servira de fondation clé pour la robotique souple de nouvelle génération durable. »
Vers un avenir robotique adaptable et autonome

L’impact pourrait s’étendre à travers plusieurs domaines. Les robots souples pourraient gérer des tâches plus complexes sans reconception constante. Les appareils pourraient se réparer eux-mêmes tout en opérant dans des conditions difficiles, incluant des environnements avec stress électrique ou dommages physiques.
Il existe par ailleurs un potentiel pour de nouveaux types d’écrans qui changent de forme en temps réel. Les muscles artificiels pourraient devenir plus réalistes, avec des mouvements qui égalent la complexité du mouvement humain.
Le changement le plus important concerne la manière dont les machines sont construites et entretenues. Au lieu d’être statiques et jetables, elles pourraient devenir des systèmes adaptatifs qui évoluent, se rétablissent et continuent de fonctionner au fil du temps.
L’étude complète a été publiée dans la revue Science Advances.
Selon la source : earth.com