Ce capteur optique miniature de la taille d’un grain de riz offre un sens du toucher inédit aux outils robotisés
Auteur: Mathieu Gagnon/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2026%2F05%2Fimage-2026-05-10T10-18-22-318Z.jpeg)
Une miniaturisation extrême pour doter les machines du sens du toucher

Le 9 mai 2026, l’organisation Optica a présenté un nouveau développement dans le domaine de la robotique. Des chercheurs ont mis au point un capteur de la taille d’un grain de riz, capable de mesurer les forces et les mouvements de torsion dans toutes les directions. Ce système remplace l’électronique traditionnelle par l’utilisation de la lumière pour accomplir sa tâche. Ce composant permet d’aider les outils robotiques et les dispositifs médicaux à ressentir ce qu’ils touchent, particulièrement à de très petites échelles.
Dans la revue scientifique Optica, les chercheurs décrivent leur nouveau capteur. Le dispositif présenté mesure à peine 1,7 millimètre et s’appuie sur un signal optique unique pour évaluer simultanément les forces et les torsions multidirectionnelles. Lors des tests de validation de principe, le capteur a démontré sa capacité à détecter les variations de rigidité. Il a permis de localiser des structures cachées au sein de modèles reproduisant une tumeur intégrée dans des tissus biologiques.
« Bien que les systèmes d’imagerie modernes puissent montrer les structures clairement, ils ne fournissent pas d’informations sur l’interaction physique, comme la force ou la torsion, et les capteurs de force existants sont souvent trop encombrants ou complexes pour s’intégrer dans des outils miniatures », a déclaré le chef de l’équipe de recherche Jianlong Yang de l’Université Jiao Tong de Shanghai en Chine.
Des interventions chirurgicales sécurisées dans des environnements minuscules
La perception du toucher à cette échelle apporte de nouvelles données aux équipements automatisés. « En permettant aux machines de mesurer la force de contact, la pression, le cisaillement et la torsion, notre technologie pourrait rendre possible pour les robots de détecter un contact dangereux de manière précoce et d’ajuster leurs actions en temps réel, spécialement dans des environnements petits et sensibles », poursuit Jianlong Yang. L’adaptation des mouvements s’opère directement selon les contraintes physiques mesurées.
Le domaine médical figure parmi les bénéficiaires de cette technologie, notamment dans les blocs opératoires. « Les systèmes robotiques utilisés dans la chirurgie peu invasive opèrent dans des espaces extrêmement exigus, tels qu’à l’intérieur de l’œil ou à travers des voies chirurgicales étroites », a déclaré Yang. La précision requise dans ces zones laisse peu de marge de manœuvre à l’erreur mécanique.
L’amélioration de la perception des instruments vise à limiter les incidents lors d’interventions chirurgicales. « En rendant les outils et les robots plus sûrs et plus précis, cette technologie pourrait rendre les procédures médicales délicates plus contrôlées et réduire le risque de dommages accidentels », ajoute le chercheur. Ces recherches sont issues d’un effort plus vaste visant à développer des technologies de détection optique destinées à la chirurgie peu invasive et aux systèmes robotiques.
La transformation de l’interaction physique en signal lumineux

Les solutions conventionnelles actuelles dépendent de multiples éléments de détection ou de structures complexes pour fonctionner. L’équipe de l’Université Jiao Tong de Shanghai souhaitait concevoir un dispositif simple et peu coûteux. L’objectif consistait à utiliser un seul signal optique pour mesurer simultanément l’ensemble des forces et des torsions dans toutes les directions.
Pour capturer l’interaction physique avec la lumière plutôt qu’avec des capteurs électriques traditionnels, les scientifiques ont créé un capteur composé d’une fibre optique munie d’une pointe en élastomère souple. Cette extrémité se déforme légèrement lorsqu’elle entre en contact avec un objet. Une déformation modifie la manière dont la lumière est distribuée dans la cavité optique située à l’intérieur de la pointe. Cela forme un motif lumineux qui voyage à travers un faisceau de fibres cohérent jusqu’à une caméra chargée de capturer ce motif sous forme d’image.
Le faisceau de fibres cohérent préserve les informations spatiales présentes dans les motifs lumineux transmis. Toute la détection peut être réalisée via un canal optique unique, sans câblage complexe ni multiplication des éléments de mesure. L’image obtenue est analysée à l’aide de méthodes basées sur les données afin de récupérer les valeurs des forces et des torsions dans toutes les directions.
« Notre capteur fonctionne différemment des capteurs de force miniatures conventionnels, tels que les systèmes à réseau de Bragg sur fibre (FBG) qui reposent sur de multiples éléments de détection et des structures soigneusement conçues pour séparer les différentes composantes de la force », a déclaré Yang. « Nous ne mesurons pas la force pièce par pièce mais nous détectons l’état de contact global en une seule étape. Nous croyons que ce changement pourrait rendre plus facile la construction d’outils compacts qui peuvent à la fois voir et ressentir. »
Stabilité expérimentale et détection sous-cutanée
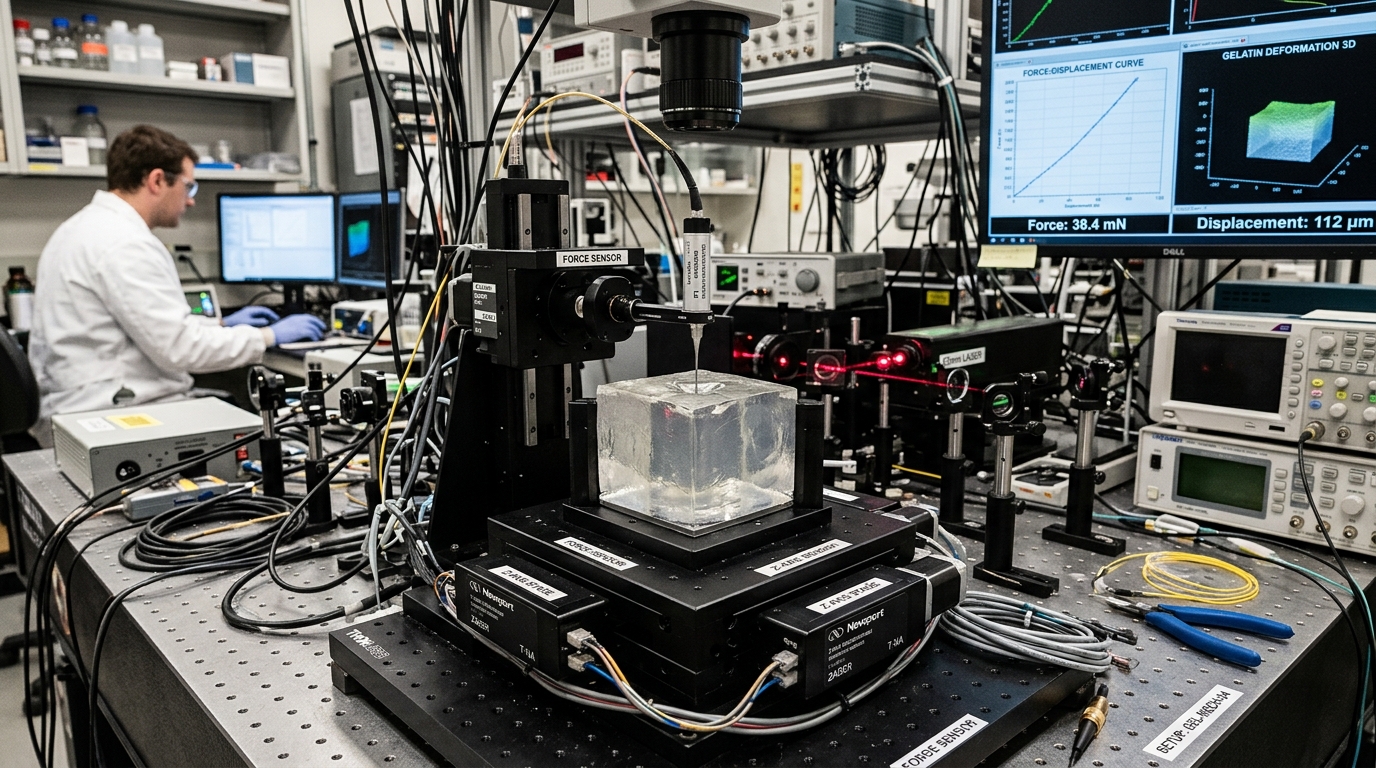
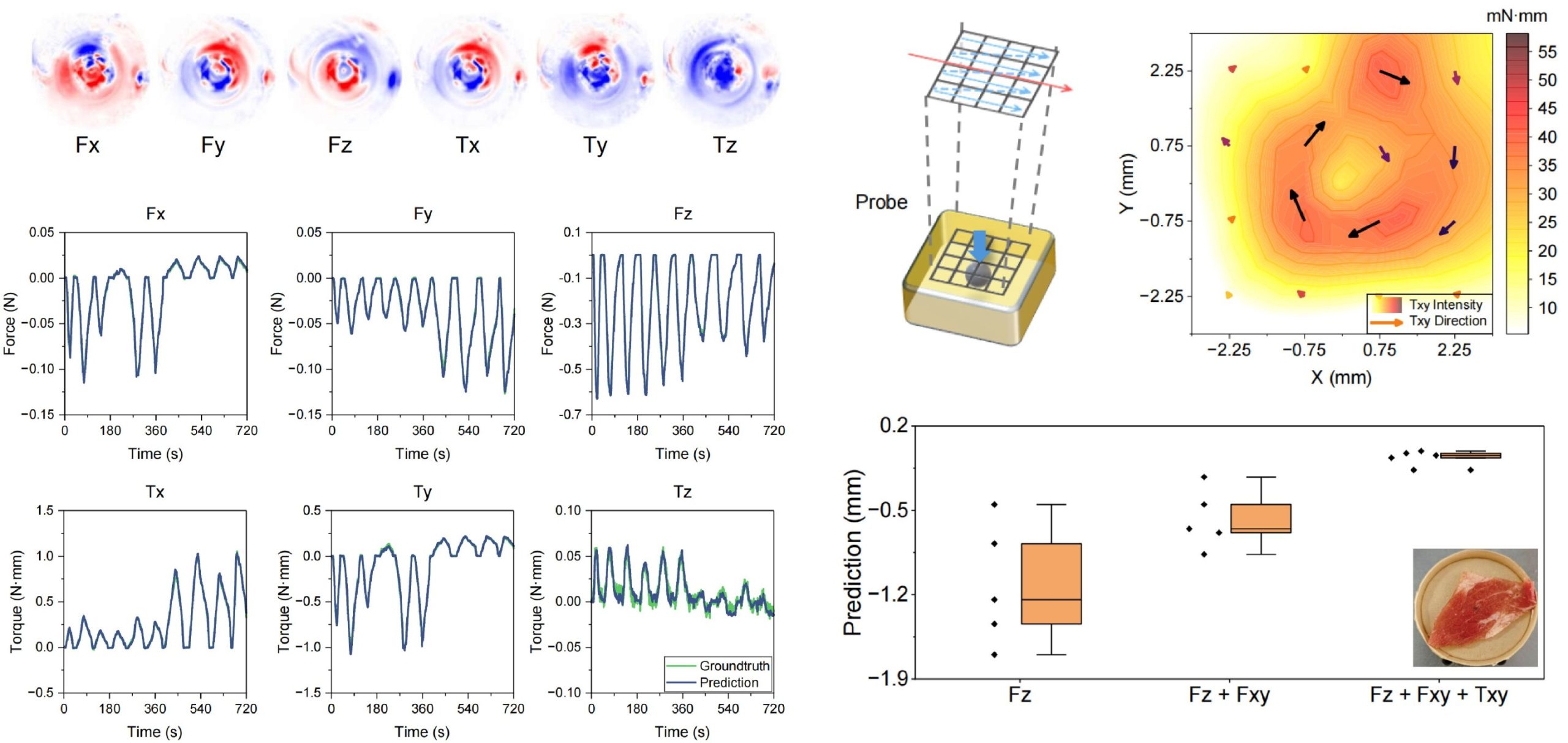
L’équipe de recherche a évalué les capacités du capteur au moyen d’un dispositif expérimental contrôlé. Des forces et des torsions connues ont été appliquées pendant que la réponse optique du système était enregistrée. Les scientifiques ont utilisé un capteur de force et de torsion de référence de haute précision pour établir des mesures de base. Une platine motorisée a permis de créer une large gamme de conditions de charge, incluant des forces combinées et des torsions.
Au cours de ces expériences, l’instrument a fourni des mesures précises et répétables avec une faible hystérésis. Le dispositif a produit des relevés presque identiques lors des phases de charge et de décharge, même sous des conditions de charge complexes. Ses performances sont restées stables face aux variations de température et lorsque la sonde a été pliée.
Les chercheurs ont mené des tests de palpation de tumeurs en utilisant de la gélatine contenant une inclusion sphérique rigide. Ce modèle visait à imiter une tumeur située sous la surface des tissus. Le capteur s’est avéré capable de détecter et de localiser l’inclusion. Ces informations pourraient soutenir le guidage tactile et la cartographie mécanique lors des interventions peu invasives.
Vers un déploiement pratique à grande échelle

La prochaine étape pour les chercheurs consiste à passer de la validation en laboratoire à une utilisation pratique. Ce passage nécessite d’améliorer la constance de la fabrication et de réduire le besoin d’un étalonnage complexe. Le capteur doit être intégré dans des outils et des systèmes robotiques correspondant aux cas d’usage envisagés. L’instrument sera testé dans des conditions de fonctionnement réalistes et sur le long terme.
Avant toute commercialisation, un développement supplémentaire est jugé indispensable pour garantir des performances fiables à grande échelle. Le système devra être conditionné sous une forme compacte et conviviale, afin de pouvoir être déployé facilement dans des environnements médicaux et industriels.
L’ensemble de ces travaux est documenté dans l’article intitulé « La transduction par champ lumineux codée par déformation permet une détection de force optique à 6 degrés de liberté dans une empreinte de 1,7 mm », rédigé par Weiyi Zhang et ses collaborateurs. La publication est parue dans la revue Optica en 2026 sous la référence DOI: 10.1364/optica.582941. Les informations concernant le journal sont disponibles sur le site de la publication Optica.
Selon la source : phys.org
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2026%2F04%2Fimage-2026-04-26T11-13-21-144Z.jpeg)
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2026%2F03%2Fimage-2026-03-19T14-07-02-384Z.jpeg)
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2026%2F03%2Fimage-2026-03-13T11-09-25-649Z.jpeg)
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2025%2F12%2Fimage-1767176970062-scaled.jpg)
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2025%2F11%2Fimage-1763201640255.jpg)
/https%3A%2F%2Flanature.ca%2Fapp%2Fuploads%2F2025%2F11%2Fimage-1762684887984.jpg)